GPS と電波航法システム
〜カーナビから巡航ミサイルまで〜 |
はじめに
 本稿では現代・電波航法システムの花形、米国防総省が運用する汎地球規模・測位システム(GPS:グローバル・ポジショニング・システム/NAVSTAR)を主に廃止されたものを含め、歴代の様々な電波航法を紹介していきます。 本稿では現代・電波航法システムの花形、米国防総省が運用する汎地球規模・測位システム(GPS:グローバル・ポジショニング・システム/NAVSTAR)を主に廃止されたものを含め、歴代の様々な電波航法を紹介していきます。
サブタイトルのように GPS は身近なところではカーナビに、また本来の目的である軍事用としては戦争報道でも話題になった各種ミサイルにまで応用されています。
そして我が国の HTV(ISS 無人補給機・1〜9
号機が運用終了)にも、制御システムの一部として利用されてたことは、言うまでもありません。
既に運用終了となりましたが、わたくし個人的にも思い入れの深い
HTV、9 号機※の完璧なまでのミッション遂行により、有終の美を飾ってくれました。
※次世代補給機となる、HTV-X が絶賛開発中。あわせて新たな基幹大型ロケット、
H3 も 2 号機以降順調に運用中されており、'24
年度末にもみちびき 6 号機(静止
軌道)打を打ち上げる等、日本の宇宙開発も既に新たなステージに入った、と言って
よいでしょう。
従来より船舶・航空機などの運行には、幅広く利用されているのはちろん近年では、ついに今では単なる”部品“として携帯電話やスマートフォンなど、各種情報機器類に
GPS 受信ユニットが組み込まれていることは、多くの方が知るところではないでしょうか。
 GPS は現代において平和利用のみならず密漁船の航行や、密航船・密輸船が沖で取引船と落ち合うために積極的に利用されてきた、というあまりスポットの当たらない点も、見逃せません。 GPS は現代において平和利用のみならず密漁船の航行や、密航船・密輸船が沖で取引船と落ち合うために積極的に利用されてきた、というあまりスポットの当たらない点も、見逃せません。
”経済冷戦“と言われてから久しい昨今、単なる民間利用の範ちゅうを越えた、負の側面も有していることを忘れてはならないでしょう(有史以来、便利な物は必ず悪用される、と言う宿命でしょうか)。
本文では GPS の仕組みを簡単に紹介しながら過去から現在、そして将来に至るまで電波航法システムの数々について地上系、衛星系ともある程度年代順に紹介していきたいと思います。 |
GPS の概要
下記に GPS の概要をまとめてみました。GPS
は高度約 20000Km を飛行する 24
機の人工衛星により構成されています。
GPS システムの概要
|
開発・運用
|
米・国防総省 |
|
使用する衛星の個数
|
24・含む予備機(8)
(現在はブロック IIA/IIR/IIR-M/II-F・最新が
III/IIIA) |
|
衛星の軌道高度及び、軌道数
|
20183Km・軌道半径約 26500Km
60゜ごと 6 つの円軌道に4機ずつ配置
赤道に対する軌道の傾斜角約
55゜
0.5恒星日周期(23時間56分4.09秒/2)で、
地球を一周(うるう秒があったので+数秒かも) |
|
搭載原子時計の種類
|
ルビジウム(比較的古い衛星と現用衛星では予備)及び
セシウム原子時計 |
|
測位可能範囲
|
全地球上と、その上空
(低軌道上の宇宙船などでも使えます) |
|
運用開始年
|
1978年の実験衛星がはじめ。民間利用は、1980年から |
|
使用周波数帯
|
L1 1.57542GHz(C/A Code 及び P[Y]Code)
L2 1.2276GHz(P[Y]Code+C/A Code)
Yコードに 2 波を用いるのは大気(電離層)による遅延誤差を相殺するため
L1 キャリアの C/A Code と Y コードの搬送波は直交している
全ての衛星が同じ周波数を使用し全て異なる拡散コードを使用している
※1 L1=10.23MHz×154
L2=10.23MHz×128
※2 ブロック IIR-M 衛星からは C/A コードも
L2 で発射、なおかつ民間に開放された
新たな軍用コードである
M コードも L1/L2 にて発射されている |
|
電波形式等
|
直接拡散方式
C/A Code 2.046MHz 帯域幅(L1 キャリアのみ)
P{Y}Code 20.40MHz 帯域幅(L1+L2 キャリア)
(いずれもサイドローブ含まず)
チップ速度 C/A Code 1.023MHz
Y Code 10.23MHz
拡散符号系列と周期
C/A Code GOLD 符号・1ms
P[Y]Code 未公開・280 日長のコードでそれを
40 分割し各衛星にて使用 |
|
測位精度
|
30m>RMS C/A Code 3m>RMS P[Y]Code |
※衛星を制御・管制するための地上系設備などを含めて
GPS である。
最新ブロックの衛星では精度向上の他、測位信号電力も増強された。
|
|
GPS の測位原理
 ここではひとまず難しい?連立方程式は忘れていただき極めて”おおまか“な測位原理のみご紹介します。 ここではひとまず難しい?連立方程式は忘れていただき極めて”おおまか“な測位原理のみご紹介します。
GPS 衛星の測位原理においては下記がポイントとなりまので、これらを踏まえながら右図をご覧下さい。
・衛星の位置(軌道)は既知である
・各衛星との疑似距離(L)は電波の到達時間に光速を掛けることで求まる
まず一つ目のポイントですが衛星の位置(軌道)はそれぞれの衛星からの信号に、自己の精密な軌道情報(エフェメリス)および他衛星のおおまかな軌道歴情報(アルマナック)が流れています。これらを基に
GPS 受信機では衛星を探索し今現在上空にある衛星の信号を優先的に選択、受信処理を開始します。
蛇足となりますが GPS 受信機を長期間使わなかった場合や、購入後使い始める際など(初期化時も同様)に測位完了までやたらと時間がかかってしまいます。これは前出の軌道情報が古く無効かそれをもっていないため、今いる場所の上空になく受信できない衛星も含めて”総当たり“で受信処理を試たり、全ての軌道歴を取得するのに
10 分以上かかるためです。
※SIM フリー・スマートフォンなどでやたらと測位が遅いのは、ネットワークアシスト
がきかないためでしょう^ ^;。これを差して”感度が悪い“とか言っている方も
いらっしゃいますが…
また軌道情報のうち軌道歴(アルマナック)というのは、精度はエフェメリスに劣りますがどの衛星がいつごろ受信できるようになるか、といった情報も含んでいるため受信後もしばらくの間は有効です。そのためいったん測位が完了した後数時間程度ならば、即座に再測位が可能となるのです。
話を本題に戻しますが先の図は 3 衛星測位の概念を表しています。既述のとおり衛星の軌道はあらかじめわかっていますので衛星からの電波到達時間を計算し、まず疑似距離
La を求めます。さらに、Lb・Lc と求めて行いき弧を描くとそれらの交点が現在位置となり測位が完了することになります。
3 衛星測位(2次元測位)では 2 衛星のからの疑似距離がわかればよいのですが、この疑似距離を測るために電波の到達時間を利用している関係で、正確な時刻が必要です。そのためもう一つの衛星よりもたらされる疑似距離とともに、原子時計の時間情報を利用するため最低
3 衛星が必要になるのです。
また 3 次元測位(2次元+高度)を行うためには
4 衛星測位が必要となります。先の 2
次元測位では
3 次元測位のうち高度を既知のものとして計算を行うものです。
カンのいい方は気づいたかもしれませんが、実は先の測位原理ではもう一点正反対の方向にも交点を描くことができます。しかし、そのもう一点は宇宙側なので実際の位置としてはありえませんから、地表の一点だけに結果を絞ることができるのです。
実際の GPS 受信機では 4 つないし
3 つの連立方程式を解き現在位置の緯度・経度を算出します。そして緯度・経度表示の機種ではそのまま、カーナビ等では数値地図に座標を表示するわけです。
カーナビでは主にベクトル地図が使用され、この地図は文字通りベクトルデータのため自由に拡大・縮小が可能です。また、一部ではラスタ・データによる地図も使用されているようです(都市部の詳細図など)。
それから船舶用である GPS プロッタでは、やはりベクトルデータにて海岸線のデータを地図として持っています。いうなれば船用のナビ(マリタイムナビゲーションというのが正しいですね)ともいえるでしょう。
余談ですが軍用の TRIMPAK といわれる、トリンブル・ナビゲーション社の受信機にはこんな逸話があります。
ヘリに搭載されたものだったのですが、これが墜落事故を起こしパイロットは無事に脱出したのですがヘリは放置されました。ところが、このヘリに搭載されていた受信機は、ケースが焼けただれているにもかかわらず正常に動作していたのです。
このことは軍用機がいかに堅牢に作られているかを物語っていますが、とりわけ戦争で現在位置を見失うことは命を落とすことになりかねないので、実に頼もしい限りであります(^_^;。
|
GPS 受信機の種類と近年のハンディ受信機事情
GPS 受信機の種類にはおなじみのカーナビをはじめ、ハンディタイプや船舶用のプロッタまで様々なものがあります。兵士用のポータブルタイプや、航空用から機器組み込みの用としてまで、実に多種多様です。
この分野になるとスマートフォンや携帯電話機に”部品“として組み込まれた、GPS
受信モジュールなど知らずのうちに皆が使っているものも。
軍用のコードは非常に高精度ですが、オンラインで補正データを受け取ることによりリアルタイムに、センチメートル単位の精度で測量が行えるものさえあります(RTK=リアル・タイム・キネマティック)。
 また近年ではハンディタイプでも、詳細地図を表示できるものが発売されており、非常に実用性が高くなっています。 また近年ではハンディタイプでも、詳細地図を表示できるものが発売されており、非常に実用性が高くなっています。
※ナビなんてスマートフォンで十分だよ、というのは早計。極短時間
での使用ならそれなりに使えるでしょう。しかし、日中画面が見づら
い上連続使用するとアッという間に、電池がお亡くなりに。
したがって長時間、単独で使えるというアドバンテージが、
ハンディ受信機にはあるのです。
ごく初期('90 年代初頭)のハンディ受信機といえば緯度・経度などの数値座標表示が主で、せいぜい簡易なグラフィックス表示(軌跡やコースプロットなど)ができるなど、アウトドア・スポーツ用と思われがちでした。
しかし '00 年以降国内ではエンペックスのボケナビ
map21EX などから始まり、世界市場ではガーミンのハンディ型上位機種などのように詳細なデジタル地図を内蔵(または追加可)しあらゆる場面で”使える“タイプが増えてきました。
今さらながら私も長年お世話になって、海外でも利用したボケナビ
map21EX では 20 万分の1全国地図を内蔵し、(概ね二車線以上の道路や鉄道などが解る程度)発売当時としては詳細な表示が可能でした(4
階調ながらオリジナル地図も CF カードに追加できた)。
近年特に国内市場が寂しい中で人気のガーミン(米国
GPS 専業メーカ)のハンディ機も、超小型の機種でも全国詳細道路地図付きのものもあります(日本語版は相変わらず高いが…)。
また値は張るものの別売で 2 万 5 千分の
1 詳細全国地図、航海参考図、あるいは世界主要国の詳細地図など、様々な地図データが発売されているのがポイントです。
GARMIN の安価な英語版+OSM がおすすめ^
^;
地図にも色々あり信頼性は市販におとりますが、無料の地図も世界中のものが用意されていて(いわゆる
OSM)、なおかつオリジナルの地図も画像データさえあれば自由に追加できますから、まさに至れり尽くせりです。
※日本付近の OSM https://www.openstreetmap.org/#map=5/35.764/139.922
OSM は比較的信頼性に劣る、と書きましたがそれでも日々に有志によって更新されているので、例えば開通したばかりの道路が早く掲載されやすい、とか利用者の多いところほど精度も情報量も高い、といった点が特徴。
日々私自身が利用していますが必要十分と感じます。
ただし GARMIN 国内正規代理店が扱う”日本語版(S-JIS)“機種は非常に高価なので、英語アレルギーでない方は安価な英語版を購入してそのまま使う、あるいは日本語化改造するという手もあります(比較的新しい機種は本体のメニュー/地図表記とも日本語化することも可)。
下記リンクに日本語化作業を至極端的にご紹介しておきます。
※英語版 GARMIN GPS の日本語化と OSM について
最新のものでも日本語版の 1/2 程度の価格ですし、純正の詳細地図が利用出来ない機種でも(S-JIS
ではなく UTF-8 のマルチバイト文字が扱えるため)無料の
OSM なら、日本語地図がいとも簡単に利用できてしまいます。
その他スキャンした紙地図や Web などから切り出した地図も、市区町村単位など小さい区画ならば簡単に”無償“(国土地理院のサイトから
DL 可)で転送して活用できるなどといった点も良いですし、なにより様々なカスタマイズが効くのが素晴らしいです。(※オリジナル画像や紙地図は
2 点の緯度・経度さえきっちり指定すれば OK)
いずれにしても GARMIN 場合は最新機種は微妙な仕様に改悪されつつあるので、一つ前くらいのモデルが狙い目だと言えます(UTF-8
Unicode 対応の英語版)。
またハンディ受信機の範ちゅうからは外れますが、車載用のポータブルナビ(いわゆる
PND)と称するもののなかには、専用バッテリを利用してハンディ機さながらの利用が可能なものも発売されています。
こちらはずっと詳細な地図(カーナビでいう
CD と DVD ナビの中間くらいの情報量)をもっており、カラー
TFT パネルを搭載しているため直射日光下での視認性には難がありますが、それを除けば一般の方(地図が読めない方を含む)には見やすい地図表示が可能です。
ハンディ受信機といわゆるメモリ式ポータブルナビの違いは、内蔵するデジタル地図の詳細度やディスプレイ以外にも、ハンディ機では普通の防水性がなかったり専用の充電式バッテリしか利用できない、などいくつかの制約があることです(クラリオンのものはオプションで乾電池
BOX 兼防水ハードケースが使える機種もあった)。
これまでに紹介したいずれのタイプも、多くが
GPS 測位精度を飛躍的にアップする(後述)最新の
D-GPS に対応(SBAS など)します。
またメモリ式ポータブルナビはマイナーメーカーのもので
\10K 台程度から(中身は WinCE ベースが多い)、有名メーカのものでも最安で
\39.8K 程度からと比較的安くなっています。
その他、単純に位置や移動軌跡の記録などであれば、秋月電子にある
\3.8K の GPS データ・ロガーでお釣りが来るでしょう。
|
C/A コード と Y コードの違い
冒頭での規格一覧の中で上記2種のコードがあるのに気づかれたと思います。この両者の違いは測定精度にあり
C/A コードは一般に開放されたもので、Y
コードは軍用に限られており高度に暗号化されています。民生用では
15〜30m 以下の精度といわれており、後述する
S/A(故意の精度劣化)がかけられているときはこの限りではありません。
また、軍用の Y コードでは一般に 3m 以下の精度といわれており、実際にはこれ以上あると言われていますがものがものなので詳細は不明です。
これは従来 P コードと呼ばれていましたが、長年の間にこの長大なコードが民間にも知られるようになってしまいました。暫定的に、自己の責任に限ってこのコードの使用が認められてましたが、現在国防総省では
Y コードに切り替え済み。
この Y コードも今後、新たな M コードが本格運用されていくと、いつかは過去の物となるでしょう。Y
コードはアンチ・スプーフィング(模倣防止)とも言われており、このコードが解読されたかどうかは現在のところ解りません。
おそらく湾岸やユーゴスラビアの様な有事の際、敵国が
P コードを使用しないように、という配慮からとも言われています。既に昔話となってしまいましたが、以前はドンパチがあると
C/A コードに普段かけられていた、S/A(セレクティブ・アベィラビリティ:選択的利用性)が解除され、極端に精度が良くなることが知られています。
古い話ですが湾岸戦争の時や先のユーゴ空爆の際に、GPS
を使用されていた方はこのことに気づかれた方もいることでしょう。湾岸戦争では砂漠の嵐作戦において、大量にばらまかれた地雷を避けながら行軍するために民生用の
GPS 受信機が、多量に使用されました。
もともと、GPS 自体が軍事目的で開発されたものなので、当然といえば当然の出来事なのですが軍用機の調達が間に合わず、民生機を大量導入した話は
GPS 関係者の間では有名です。
|
S/A(故意の精度劣化)の廃止と GPS の誤差原因
いうまでもなく S/A は故意の精度劣化そのものなので、ないに越したことはありませんが、嬉しいことに
2000年 5/2 以降 S/A が恒久的に解除されました!(それ以前からあったウワサは本当だったようです)。
実際にハンディ GPS で測位してみると、S/A
があるのとないのとでは大違いで、GPS
受信機の測位結果と実際の位置を、緯度・経度入りの地図で照合してみると、”秒“の位までピタリと合うようになりました。
また以前は、常に微速度で移動しているような測位結果だったのが(ドリフト)、これまたピタリと静止状態として表示されています。S/A
のないときはその GPS 受信機の裸の精度が出ますが、安価な民生機でこれだけの違いが出るとは、思っても見ませんでしたので感激もひとしおです。
近年のカーナビでは D-GPS やマップマッチングの搭載が進んでいるので、精度劣化に気づきにくいかもしれませんが、D-GPS
が有効な場合でもその送信所から離れるに従い、誤差補正も効きにくくなってきます。
カーナビの場合、D-GPS のための信号は
FM
多重により伝送されていました。そのため
FM
文字多重放送を受信できないようなシチュエーションの時に、S/A
解除の効果が現れてきます。
またそもそも S/A を開始した理由が、「当局の意に反して、予想外に民生用受信機の精度が良くなってしまったため」です。そのため紛争地域や敵国で安価な民生機が、軍事目的に使用される恐れがありました。
しかし、GPS 衛星が紛争地域や敵国上空を通過するときにのみ、S/A
をかけられるようシステムに改良を加えた、ということでこの問題がクリアされたのです。これからも真の平和利用へ向け、応用範囲が広がることを期待します。
誤差はないに越したことはありませんが、実は
GPS には S/A 以外にも様々な誤差の原因があります(下図)。 |
|
軍事的利用
元来の使用目的である軍事的利用についてですが、これにはミサイル(巡航ミサイルや
ICBM、その他の精密誘導兵器)の命中精度の向上、兵士や車両、航空機や艦船のナビゲーションなどが想定されています。
実際には、あの有名な巡航ミサイル”トマホーク“に
P コードの受信機が内蔵されていることはよく知られたところです。また、実を言うと湾岸戦争で使用されたトマホークには
GPS なしのケチりタイプだった、とのたれ込みがありました(^_^;。(身に危険が及ぶため情報源は公表できません<ボカスカ)
たぶん、予算の都合でしょうがユーゴの時のように誤爆するキケンがあるためぜひとも、ケチりタイプは使用しないで頂きたいと思います。これはお金云々よりも人道的立場からの要望です。
また、湾岸戦争当時砂漠での行軍は、まったく目印がないため
GPS が大変強い見方になります。さらに砂漠の至るところには、敵により地雷が仕掛けられていました。行軍の際あらかじめ
GPS 受信機に地雷源の位置をメモリしておけば、目的地を設定して進めば真夜中だろうと砂嵐の中だろうと、正確に行軍することが可能となるのです。
最後に国内のことも少しだけふれておきます。某航空自
A 隊の航空機(輸送機など)には、オリジナルの
GPS マッピングシステムが搭載されていたりしています。
ディスプレイには非常に美しい表示のグラフィカルな地図が映し出され、しかも大画面。専用にしておくのがもったいないくらいです(^_^;)。
|
GPS の非軍事・民生利用
現在もっとも身近なのはカーナビに他なりませんが、それ以外では携帯電話の位置情報サービスや、AVM
システムがあげられます。
携帯電話の位置情報サービスは、事業者により測位方法や精度に違いはありますが、基本的には携帯電話端末機内蔵の
GPS 受信機を用います。
一般の GPS 受信機との違いとしては、GPS
衛星がうまく見通せないときのために、携帯電話基地局からの信号を測位の補助に利用したり、場合によっては基地局からの信号のみで測位が行える点です。
更には地図表示の際、進行方向が常に上となるよう、いわゆるヘディングアップ(方向オンチ用の機能)を行うために、磁気コンパスを内蔵した端末もあります。
また AVM システムはタクシーやそのほかの運送業、パトカーなど緊急車両の現在位置を
GPS 測位によりセンター側で常に把握し、車両の効率的管理・運用をしようというものです。
例えばタクシーではリクエスト地にもっとも近い車を配車できるので、車両の運用効率がアップします。また、運送業でも集荷業務の際に同じことがいえるでしょう。
パトカーでは 110 番指令の際にもっとも現場最寄りの車両に、指令を出すことができるようになりレスポンス・タイム(現場到着までの時間)の短縮に役立っています。
近年では急増する携帯電話や PHS からの緊急番通報に対応するため、これら端末への位置情報自動通報機能搭載が義務づけられようとしています。
移動体電話からの緊急通報では通報者自身が、自分の位置を把握していない例が多く地理不案内のため、パトカーや警官の臨場が遅れてしまうことが多々あるためです。
それに加え、命に関わるような場合や一刻を争う場合もありますから、このような場合位置情報の自動通報はかなり有効といえると思います。
そのほか専門的なところでは、GPS による精密測量があります。従来、測量にはトータルステーションと呼ばれる光学式のものが使用されていました。
これに対し、GPS 測量では見通しがきかない場所同士や、霧などの際にもセンチメートル単位の測量が可能となるのです。これには、従来
P コードを使用するものが一部ありましたが、現在では使用不能なのでこれらの搬送波の位相を精密にみることで測定します。
また従来、この方式では測定したデータを持ち帰り、パソコンで処理しないと測量結果が得られませんでした。しかし、近年ではリアル・タイム・キネマティック等に代表されるような実時間測定が可能となり、より実用的で一般的なものになりつつあります。
 その他では GPS 測位そのものの応用ではありませんが、精密な時刻同期のクロック源として
GPS を活用している例があります。 その他では GPS 測位そのものの応用ではありませんが、精密な時刻同期のクロック源として
GPS を活用している例があります。
身近な例では au(KDDI)がサービスしている
CDMA 方式の携帯電話基地局の時刻同期用です。クアルコム社の方式を採用する
au では、携帯電話の通信に用いる拡散コードが全ての基地局で同期している必要がありますが、これのクロック源に
GPS の時刻情報を用いています。
写真は CDMA 方式基地局に取り付けられた、GPS
アンテナです。古いものではまるでマッシュルームのような、半円レドーム形状でしたが後期バージョンからは写真のようなとんがり帽子になりました。
その他 GPS の時刻情報を用いる例としては、高速な光ファイバ回線の切り替えタイミングを図るのにも応用されているようです。
また近年注目されている活用法としては、精密測量と同じく
GPS の搬送波位相を観測する方式で日本全土に、地盤のわずかな移動やゆがみなどを監視するシステムが構築されています。
これらのシステムでは、例えば震災のあった地域ではその前後で地盤がどう動いたか、精密に観測することができます。
また副次的な利用法としても注目されているのが、水蒸気による搬送波遅延観測です。
これで何が解るのか?といえば、空気中の水蒸気量を定点観測できることで、集中豪雨など局地災害の予測や注意報・警報に役立てることが出来るのではないか、と言われています。例えば
Y コードでは、電離層遅延誤差を相殺するために
2 つの異なるキャリアを用いています。
しかし、どうやっても取り除けない誤差がありそのうちの一つが、空気中の水蒸気量によるものなのです。誤差が水蒸気量に比例することに着目した、おもしろい活用法だと思います。
|
|
D-GPS の概要と最新動向
近年では巷でもよく、D-GPS(ディファレンシャル
GPS)という言葉が聞かれるようになりました。これは前項で解説した様々な誤差(S/A
を含む)を予め正確な座標の解っている基準局で受信して算出、この誤差情報をなんらかの媒体に載せ利用者側の
GPS 受信機に随時伝送、演算することでこの誤差を相殺しようというものです(下図)。
つまり D-GPS を用いると基準局からある一定の範囲内では、基準局自体の位置は既知ですから随時補正をかけることで、誤差を限りなくゼロに近づけられるのです。しかし一般的に基準局を離れるに従い、受信点から見た衛星配置など諸条件が変わるため、補正後の精度も徐々に低下する事になります(数百
km 程度の有効範囲はあるようです)。
カーナビでも既存の FM 放送に多重する形で
D-GPS 情報が流れていたので、'08-03 月いっぱいまでは(※詳細は後述)対応機種では全国的に利用できました。これにはゾーン情報も流されており、もし現在の
D-GPS 基準局を離れてしまっても、自動的に放送局を切り替えることが可能でした(具体的には
FM データ放送(DARC 方式)にて時分割多重送信されていた)。
例えば都心では送信所となる東京タワーから半径
20Km程度の強電界域において、良好な補正結果が得られていました。なお
D-GPS 技術自体は一つの基準局でかなりの範囲をカバーできますが、カーナビの場合は
FM 多重放送のサービスエリアという制約をどうしても受けてしまいます。
ですからカーナビの D-GPS 有効範囲は FM
多重に限れば、使用する放送局がステレオで受信出来る範囲と同じくらい、と考えて良いと思います。通常は既述のとおり、自動選局なので気にしなくていいのですが、エリア境界付近では精度劣化(うまく補正データを受信できない事による)を感じたものです。
また加えて近年のカーナビが非常に高精度なのは、先のような
D-GPS と併せ自律航法(圧電ジャイロと車速パルスまたは加速度センサ等)及びマップマッチング(推測でなるべく道路上に自車位置を表示)を使う、という複合技術のたまものなのです。
ただ残念なことに '08 年 3 月いっぱいをもって、この
FM 多重による D-GPS 情報の提供サービスが終了してしまいました。いろいろと都合があるのでしょうが、下記リンクや各カーナビメーカがいうように
D-GPS サービス終了後に、従来通りの精度が得られるかと言ったらそれは到底無理と断言しておきまょう(^_^;)。
衛星測位情報センターによる「FM多重DGPS放送終了のお知らせ」
※残念ながらリンク先 URL が消滅┐(´ー`;)┌
例えば、高速高架下やビルの谷間など上空が開けず、マルチパスの多い条件下においてはいくら近年の超高感度な受信部を持ってしても、まともな受信状態は得られません(受信できたとしても精度劣化はまぬがれない)。
またこの様な場合にも、据え付け型の高級?タイプでは自律航法を用いるため、ある程度は”マトモ“と思われる現在位置を示してくれます。しかし、そのような悪条件が長く続くと誤差が累積しワープ表示する場合もあります。
私自身 FM 多重による D-GPS 終了直後の '08
年 4/1 には、交差点を右折する際カーナビの軌跡表示がなぜかいったん、交差点を直進しまるで少し先で
U ターンし右折したかのようになることがあり、精度劣化を実感することが出来ました(ボカスカ)。
改めてメーカーなどのいう謳い文句が、”まやかし“であることが立証されたわけですヽ(´ー`)ノ。
|
|
SBAS(静止衛星による D-GPS)
ひとつだけ光明がさしたとも言えるのが、MTSAT(運輸多目的衛星)SBAS(SBAS:Satellite
Based Augmentation System[衛星ベースによる補強システム])機能による
D-GPS の提供でした。元は航空機に対しての
GPS の補完・補強を目的としたものですが、前出の対応ハンディ
GPS 受信機のほか、多くの組み込み受信機モジュール等で同機能が利用可能です。
このサービスは我が国の静止衛星 MTSAT(愛称・ひまわり)によって、'07-09/27
から正式に開始されたもので地上の基準点で受信された、各
GPS 衛星ごと固有の誤差や電離層による遅延誤差等の情報をもとにした補正情報を演算、これを
MTSAT にて配信するものです。
この SBAS によって理想条件下では、数 m
程度といった精度が得られることになりしかも、衛星によるサービスですから、対応受信機ならばおおよそ全国(実際のカバーエリアは日本を含むアジア太平洋地域とかなり広い)で使えるなど願ったりかなったりです。
MTSAT は東経 140度及び145度に位置していたので、東京ならばほぼ真南の上空でおおむね仰角
45 度以上が見渡せれば OK でした。
しかし、'20 年 04 月よりみちびき 3 号機(QZSS-3・静止衛星)に切り替わりましたので、東経
127 度上空、仰角は日本から見て若干下がるような形で、南南西の方向が見通せる必要があるということになります。
下図に SBAS の概念図を示します(図中は旧
MTSAT のままです。QZSS-3 に読み替えて参照されて下さい)。
 |
|
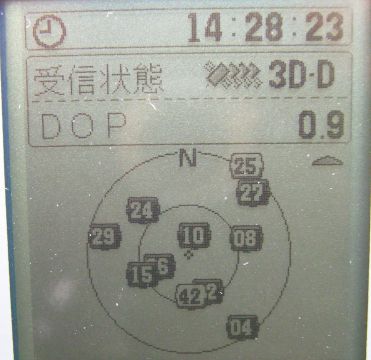 私は実際にエンペックスやガーミンの対応受信機を利用してきましたが、平面精度指標(受信機ごとに表記が異なるので注意)がおおよそ、単独測位より
2〜3 倍程度は良くなります。右の写真は MTSAT
を受信している様子で 42 番(白抜き)のアイコンが
MTSAT-1R を示しており、右上の「3D-D」という表示が
D-GPS 有効であることを示しています。 私は実際にエンペックスやガーミンの対応受信機を利用してきましたが、平面精度指標(受信機ごとに表記が異なるので注意)がおおよそ、単独測位より
2〜3 倍程度は良くなります。右の写真は MTSAT
を受信している様子で 42 番(白抜き)のアイコンが
MTSAT-1R を示しており、右上の「3D-D」という表示が
D-GPS 有効であることを示しています。
試しに長時間自宅でログをとってみても
SBAS
有効時は極めて正確で、従来酔っぱらいのように向こう三軒両隣をうろついていた軌跡がほぼ自宅上でまとまりますから感激もひとしおです。
こうして実際に SBAS の恩恵にあずかってみると我々の収めた税金も本当に役立っている、と実感をもって言えるのではないでしょうか(無駄遣いの方が多すぎて国家財政は火の車だが…)。
対応受信機からはそれぞれ、QZSS-3 が衛星番号
50 番※と 42番(みちびき 6 号)としてみえます。
※衛星番号は PRN マイナス 87 という GARMIN
デファクト・スタンダード表記。
QZSS は PRN137 番なので、87
を引いて
50 番と受信機に表記する方法。
QZSS スタンダード信号の PRN は異なるが、互換性をとるため元来の衛星
番号 189(L1)に加え従来の SBAS 用
PRN が引き続き使われている。
その他、近年普及率の高まっているメモリ式ポータブルナビでは基本的に(いわゆる車載純正ナビもメモリ式が普通になった)、自律航法センサを持たなものも多いので悪条件下では惨憺たる測位結果となるのは目に見えており、メーカの”FM
多重による D-GPS サービスの終了後も精度に問題はございません“の謳い文句は、全く信用ができないのです。
ましてや簡易型のこれらのナビでは、内蔵アンテナがダッシュボード上へ設置されることになるので結果的に(乗用車はマシな方でバンでは実に全天周の半分近くがマスクされる!)、全天周の約
1/3 は車体でマスキングされたままですから元々条件が悪いのです。この様な条件下ではその他車線が少なく高い防音壁に囲まれた高速道路上などで、たとえ上空が開けていたとしてもいまいちな測位結果となる場合があります。
近年では超高感度型受信機が一般的になっているとはいえ、この超高感度を発揮できるのは既に測位可能な衛星補足状態にあるか、その直後の再補足時に限られるのです(GPS
通信方式の特徴、DS-CDMA の特性を最大限活かした
受信処理用 LSI 回路動作の工夫による)。
またグチになってしまいましたがそれでも、最近流行りだしたメモリ式のポータブルナビは個人的になかなか良い感触です。今のところ出始めで、画面が小さいことを除けば地図の緻密さもまあまあで(CD-ROM
と DVD-ROM の中間くらいの情報量)、その他の機能もまずまず充実しています。そして、何よりも一番最初に痛む
CD/DVD-ROM の光学ヘッドを持たないので、それなりにはハードの耐久性があるだろうことがメリットとして期待できます(安価な製品の多くは
OS が Win-CE なのは微妙ですが<マシンリソースとエネルギーのムダ。今は亡きサンヨーのは
I-TRON だったらしく好感が持てます!!)。
しかしなぜかどのメーカも一部を除き、どの機種も
FM 多重による VICS 受信機がありませんでした。メーカは既存機種と差別化したいのか、バッティングする機能をあえて搭載しないのか意図はわかりませんが、こういうことをしていると売れるものも売れなくなるというのが世の常です(私の予想通り?!サンヨー健在時のゴリラ/Miniゴリラは人気機種でした♪)。
かつては超ツカエナイ HDD ナビ、なんて言う信じがたい物もありました。(すぐイカれる飛んでもない商品。フラッシュメモリにアッという間に置き換わり、即死に近い形で滅びた┐(´ー`)┌)。
分野は変わってプライオリティの高い船舶関係では、海保による
D-GPS サービスが提供されていました。これには中波に専用割り当てがあり、そこで誤差情報が伝送されていました。またいずれの場合も良好な条件下では、概ね数
m 程度の精度がでます。
ただし残念ながらこちらは '19 年 03 月 01
日をもって、サービス終了となってしまいました。これは海保のシステム自体が内包する問題の他、SBAS
など他の D-GPS 手段が普及してきたためでしょう(※詳細は下記リンクを参照)。
海上保安庁による D-GPS 終了のお知らせ(PDF
型式)
 航空機への応用 航空機への応用
最後に既述の SBAS による D-GPS の精度・信頼性向上により航空機への応用が主として考えられています(こちらが本来の目的)。GPS
ではとくに高度情報に誤差が出やすく(地球がいびつな楕円形をしているため)、一般に信用できないデータが多いものですがその点の補正信号を含め、プラスαの
GPS 衛星としてスタンダードな測位信号も送信されています。
GPS システムそのものは完成していますが、時間帯によっては衛星配置が不適切で(天空の一ヶ所にまとまってしまうなど)測位精度が著しく低下する場合がありますが、静止衛星ならば常に決まった衛星位置からの信号を受信できるため、それだけでも精度低下の防止に寄与しています。
SBAS ではそれに加えて、高度を加えた各衛星ごとの
D-GPS 補正情報、並びにその信頼度情報など多岐に渡る補強信号によって、航空機の安全な運行を支援します。
ただしこれらは従来からある ILS/ローカライザなどの既存航法システムを補完するもので、取って代わるものではありません。また米国などでも同様の航空機向け
GPS 補強・補正システム(WASS)が運用されています。
インマルサットによる SBAS など
実は米国の WASS といった SBAS は、インテルサット(民間の国際衛星通信会社)等により実現されています。例えば他にも
EU の EGNOS などが代表的ですが、世界へ目を向けると多様な
SBAS が運用されております。
各国の実現方法も様々で多用途の衛星に L1(C/A)
GPS 互換信号や、補強信号送出機能などを付加することで実現されています。
そのうちインマルサット(※)の西太平洋版(INMARSAT-4F1)が国内でも使用できます。
※国際海事衛星機構から事業を引き継いだ民間国際衛星通信会社
これはオーストラリアによる、GATBP というシステムで東経
143.5゜に位置し、'17 年度末より L1 信号を送出開始したと発表されています(現在試験運用中)。
基準局がオーストラリア本土およびニュージーランドにあるため、実際に利用・比較してみると
QZSS-3 使用時より精度はどうしても劣るようです。衛星番号は
35 番として見えますので、42/50 番以外によく受信される
SBAS があるな、と感じたら注意してみてください。
対応エリアは環太平洋地域をほぼカバーしたもので、QZSS-3
とかなりの地域でかぶっています。大海原へ出て東へ大きくそれると、その恩恵をありがたく感じることもあるのではないでしょうか!?。
最後に全くの余談になりますが、つい最近中国の
BeiDou 静止衛星(GEO-1)からの信号が、衛星番号
43 番としてよく受信されるようになりましたので、SBAS
利用の際は注意してください。
ムダに信号が強くてなんだか邪魔な感じです(ボカスカ)。詳細な情報がありませんが、東経
140゜ の静止軌道上にあり、'18 年 11 月打上の物のようです。
|
準天頂衛星システム(みちびき)について
'18 年 11/01 よりサービスの本運用が開始された、「準天頂衛星システム(愛称:みちびき)」についても
SBAS と関連があるので概要を述べておきます。
準天頂衛星とは我が国の上空の天頂付近(概ね仰角
60 度以上の高緯度)に、常時 GPS 互換の測位衛星が見えるように配置することで、不感地帯の減少、精度の向上などを狙ったものとなっています。
具体的には特殊な軌道傾斜面を持つ円軌道に、最低
3 つの衛星を配置することでそれぞれの衛星が入れ替わりに、我が国の天頂付近に見えるようになるもの。
そして GPS 互換の L1 C/A コードに重畳して、D-GPS
のための補強信号や電離層遅延誤差を補正するための
L2 C/A コードなどを(最新ブロックの
GPS 衛星も同様のコードを送信している)送信する機能を有しています。
|
●みちびきが送信する信号一覧
| ・L1 C/A(※GPS 互換) |
・L5(電離層遅延誤差補正) |
| ・L1C |
・L5S(測位技術立証 サービス)
※L5 グループ 1176.45MHz |
| ・L1S(サブメータ 級測位補強) |
・L1Sb(SBAS 配信)
※L1 グループ 1575.42MHz |
・L6(センチメータ 級測位補強)
※L6 1278.75MHz |
・L2C(電離層遅延誤差補正)
※L2 1227.60MHz |
・S バンド(衛星安否確認)
※2GHz 帯 |
|
準天頂衛星は特殊な軌道ですが、ちょうど
24 時間で 8 の字を描くような感じで、とくに地上から見て「8」の字の上の部分が極端に小さくいびつなのがポイント。ここに衛星が来た際天頂付近に長くとどまって見えるよう、計算された軌道となっています(右下図参照)。
※実は通常の静止衛星もごくわずかに約
24 時間周期で 8 の字に動いています。太陽
など他の大きな天体の潮汐力によるもので、軌跡は綺麗な対称形(上下左右とも)
となるのがポイント。正常な時は軌道修正により問題のでない範囲に収まっている
のでご心配なく。ほんとうにごくごく僅かです^
^;。
準天頂衛星(静止衛星を除く)の軌道要素は東経
135゜を中心とした、軌道傾斜角 41゜・23
時間
56 分周期(GPS と同様)となっています。
|
●みちびき年表ぽいもの
| ・'10 年 |
みちびき 1 号機打上(実証試験機・準天頂軌道) |
| ・'15 年 |
計画の予算化決定 |
| ・'17 年 |
みちびき 2 号機打上(準天頂軌道) |
| みちびき 3 号機打上(静止軌道・東経 127 度) |
| みちびき 4 号機打上(準天頂軌道) |
| ・'18 年 11/01 |
みちびきサービス・本運用開始 |
| ・'20 年 04 月頃 |
SBAS サービスを MTSAT より引継完了
(※旧型受信機との互換性は非常に高い模様) |
| ・'21 年 10 月 |
みちびき 1 号・後継機打上(準天頂軌道) |
| ・'23 年 09 月 |
みちびき 1 号機・運用終了/軌道離脱(実証試験機)
|
| ・'25 年 02月 |
みちびき 6 号機打上(静止軌道・東経約
90.5
度) |
| ・'25 年 07/18 |
みちびき 6 号・運用開始 |
| ・'25 年 年度中 |
みちびき 5/7 号機打上予定 |
|
 このように 3・6 号機以外は静止衛星ではないため、天頂付近に衛星が見える時間帯はどうしても限られてしまうので、交代で
3 機の衛星が順序よく天頂付近に来ることで、ビルや高架下、谷間や山影などの不感地帯を減らすことができる、と計画では謳っています。 このように 3・6 号機以外は静止衛星ではないため、天頂付近に衛星が見える時間帯はどうしても限られてしまうので、交代で
3 機の衛星が順序よく天頂付近に来ることで、ビルや高架下、谷間や山影などの不感地帯を減らすことができる、と計画では謳っています。
現在のところ対応受信機は一部なばかりか、GPS
互換の L1 C/A コードしかデコードしませんから、あたかも日本付近に
GPS が常に増えたかのように振る舞うにすぎません。
現行の SBAS のような高い効果が得られませんから、超高精度を謳う補強信号に対応した受信機を早く拝みたいものです(一般紙・雑誌などの記事では、超高精度化をよく取りあげているが、書き方には疑問を感じざるを得ない)。
もちろん未対応受信機では、まったく恩恵にあずかることが出来ないのは言うまでもありません(通常の
GPS としてすら見えない<ボカスカ)。余談となりますが、興味ある方のためにみちびきの軌道シュミレータの
URL を張っておきます(日本政府公式サイト)。
★みちびき軌道シュミレータ★
また本システムは、本稿執筆時点で未完成ではありますが
'24 年度末からは、衛星 5 機(うち 2 機は静止衛星)体制で本運用されることから
24 時間を通して、受信しやすくなっていることでしょう。
とくにその名の通り天頂付近に衛星が見えるのは、予備機を除く各
1 機ごとに着目すると一日のうち 1/3 程度の約
8 時間ほどです。既述の説明と多少重複しますが、これが代わる代わるうまい順番で入れ替わることで、24
時間天頂付近に衛星が見えるようになる、というからくりです。
今後 7 機によるシステム完成まで、暖かく?見守っていきたいものです。
・SBAS のミッションを MTSAT から引き継ぎ
'20 年 04 月より正式に SBAS が、みちびき
3 号機の静止衛星に引き継がれました。
いまのところ、複数の GARMIN 受信機(最新を含む)はもとより、13
年以上前の GPS 受信機ユニット(SiRF 社製モジュール使用)を搭載した白黒
LCD 端末でも、正常に SBAS を利用することができています。
そしてあくまで建前上ではありますが、旧来の
MTSAT による SBAS と完全に近い?高い信号互換性を謳っており、衛星番号も既出の通り
50 番を引き継ぎました。
したがって SBAS 対応受信機では従来通り、そのまま使えることが多いものと考えられます。
ことさら航空用としても利用されているものですから、こうした将来に渡る運用の連続性というのは極めて重要と言えるでしょう。
さらに '25 年 7/18 には同年 2 月に打ち上げられた、みちびき
6 号機が運用開始となり衛星番号 42 番を引き継いだようです。ただし試験運用時からなぜか、みちびき
3 号機の位置に、42 番が表示され続ける?というよくわからない状況が続いています。
本来ならば 3 号機よりもかなり西に見えなければならないので(みちびきシュミレータでも確認できる)、詳細な原因は不明となっています。
しかしながら試験運用中は、SBAS そのものが、うまく拾えなかったり不安定だったりしたので、よしとしています(ボカスカ)。
ただし受信状況を良く確認すると、やはり以前より信号が微妙に弱い感じがして、以前うまくとれた場所で受信不能になっているなど、3
号機単独のときとの違いを感じざるを得ません。
うまく受信出来る場所では、SBAS による D-GPS
確立までがかなり早くなった印象です。だいたい
1 分半程度だったのが、1 分かからないときもあるようですし、精度そのものも改善されている気がします。
みなさんの環境では、いかがでしょうか??。
|
|
|
双曲線航法の原理
さて、ここからだんだんマニアック?になってきます(^_^;)。GPS
などの衛星系システムが普及する以前は、この双曲線航法が電波航法の花形でした。ロラン、デッカ、オメガなど例外なくこの方式です。
 双曲線航法とは、「2 点からの距離差が一定の点の軌跡は、その
2 点を焦点とする双曲線となる」、というところからきています。言葉で書くとわけわかですがとりあえず右図をご覧ください(^_^;)。 双曲線航法とは、「2 点からの距離差が一定の点の軌跡は、その
2 点を焦点とする双曲線となる」、というところからきています。言葉で書くとわけわかですがとりあえず右図をご覧ください(^_^;)。
2 カ所の送信所からの電波を受信し、その到達時間差がわかればその場所は
2 つの送信所間で決まる特定の双曲線上に存在することになります。
この 2 点の送信所のうちどちらか一方を共通とするもう一つの送信所からの電波も受信することで、さらにもう一つの双曲線が得られることになります。そうすると、現在位置はこの
2 つの双曲線の交わる点になり特定できるというわけです。
図の A B C がそれぞれ送信所を示します。そして
A-B と B-C の基線があります。そのうち A-B
による基線と B-C による基線を実線で表してあります。その間には、A-B
による距離差が一定となる双曲線を複線で、B-C
による双曲線をやはり複線で点線にて示しています。
このような感じで送信所をいくつか設置することで、ある範囲内で現在位置を知ることができるシステムがつくられます。地表波を利用する双曲線航法ではサービスエリアを広くするために、数十KHz〜数百KHz
という帯域の電波が使用されます。
またその電波のパルスもしくは搬送波の位相を見ることで時間差を測定します。双曲線航法では使用する電波の周波数が低いために、あまり高い時間分解能が得られず
GPS に比べると高精度とは言えません。
さらに基準となる送信所は地球上にあるため、高度情報は得られません。高度情報を得るには
GPS の様に、送信所(衛星)を 3 次元的に配置する必要性があります。
|
|
■電波航法・地上系システムのいろいろ
ロラン
 GPS が普及する前、船舶用の航法システムといえばロランが一般的でした。これはもともと第二次世界大戦の初期、アメリカとイギリスの協力で開発されたもので双曲線航法の典型です。 GPS が普及する前、船舶用の航法システムといえばロランが一般的でした。これはもともと第二次世界大戦の初期、アメリカとイギリスの協力で開発されたもので双曲線航法の典型です。
ロランではすべての局が同じ周波数で送信し、そのパルス数(主局が
9 パルスで従局が 8 パルス)と送信される順番で、どの局の信号か識別します。またそのパルスの位相を比較することで時間差を測定しています。
最初の目的は軍用機の航法のためでしたが、後に民間船舶などにも広く使用されるようになっています。
日本近海ではロラン C および A の
2 チェーンが運用されていましたが、現在では
C チェーンのみの運用となっています。C
チェーンも
94 年以降米国沿岸以外の廃止に伴い、米沿岸警備隊から日本の海上保安庁へ運用が移管されました。
さらに 80 年代にはロシアによって、独自に設置されたロラン局が明らかになりこれも利用できるようです。また、韓国にある送信局も運用を韓国政府が引き継ぎ、これも継続利用できるようです。
ロランは一つの主局と 4 つの従局がグループとなり構成されています。従来、主局は硫黄島に設置されていましたが軍事的理由で新島に移設されており、その巨大な鉄塔はかなり遠くからでも視認することができます。
また、使用される搬送波は 100KHz となっており、長波のため地表波が非常に遠くまで届きます。なお、日本のロラン
C チェーンは北西太平洋チェーンと呼ばれていました。
日本ではこれまで硫黄島から新島へ移転された主局、十勝太(北海道)、慶佐次(沖縄)、南鳥島の
4 局で運用されていましたが GPS の普及により利用者が激減。'09
年 12 月 01 日には南鳥島局が閉局、続いて'13
年 02 月には十勝太局も閉局し矢継ぎ早に送信用鉄塔がむなしくも解体されてしまいました。
南鳥島局閉局の時点で同システムのカバーエリアはほぼ半減した、とされていましたから更にエリアが激減したであろうことは言うまでもありません。
十勝太局の解体は地元北海道ではニュースになったようでしたが、こちらでは話題にものぼらなかったように思います。また
'14 年 02 月には一昨年前の十勝太局に続き、ついに新島主局も運用が停止されるに至りました。
これで我が国が運用するロラン C チェーンは運用を終了、現在沖縄の慶佐次局のみが運用を続けられ韓国の
C チェーン(チェーン呼称は図のものと変わっているかもしれません)の一部として、かろうじて存続している模様です。
私は個人的に伊豆七島へ毎年のように旅行しますが、船上から見た新島主局の鉄塔は本当に巨大で、山上に建てられていたためかなり離れるまで視認することが出来ました。
旅行の帰路、徐々に小さくなっていく島と鉄塔をいつまでも眺めていたので、私はその光景を忘れることが出来ません。
ある民宿では新島に主局のあるロラン C チェーンの双曲線が入った海図が昔から壁に貼ってありました(ようやく撮影できたので本項文末に掲載します)。
ここでとっておき?の昔は東通工・写真ライブラリから古いロラン
C 受信機(実物)を特別に掲載しましょう^ ^;。
 ロラン C の測位精度ですが、おおよそ 200〜400m
程度と言われています。従来はもっと精度が低かったらしいのですが、近年の受信機のデジタル化によりかなり向上した模様です。 ロラン C の測位精度ですが、おおよそ 200〜400m
程度と言われています。従来はもっと精度が低かったらしいのですが、近年の受信機のデジタル化によりかなり向上した模様です。
なおロラン A は 77 年以降やはり全てが、日本により運用されていました。こちらもロラン
C への移行が済んだ時点で、太平洋岸の局は廃止されたことになっています。
日本では主に船舶で使用されていますが、米国では
GPS 普及以前には航空機やトラックなどでも使用されていたようです。
|

※写真は伊豆諸島海図の新島付近。双曲線が複雑に描かれているのが解る。
|
デッカ
|
 デッカもやはり第二次世界大戦のさなかイギリスで実用化された、双曲線航法システムです。先のロランと同じように複数の送信所を用いてその信号の到達時間差から、現在位置を求めるという双曲線航法の原理は変わりません。 デッカもやはり第二次世界大戦のさなかイギリスで実用化された、双曲線航法システムです。先のロランと同じように複数の送信所を用いてその信号の到達時間差から、現在位置を求めるという双曲線航法の原理は変わりません。
現在、北海道を除き段階的に廃止されている模様です。また国内では
67 年から海保により運用されていました。
使用される周波数は 14KHz 近傍で、各送信所ごとに違った周波数を使います。また主局と
3 つの従局で 1 つのチェーンが構成され、従来日本では
6 つのチェーンが運用されていました。
またデッカシステムでは受信局側で得られる情報は、位相差だけになるので多少独特な方法を用いて位置を特定します。原理的に
2 局からの位相差を見るだけなのですが、それでは位置を特定することはできません。
簡単な原理を挙げると、まずデッカでは主局と従局を赤・緑・紫の
3 つの色で呼びわけます。チェーンには 14KHz
付近の固有周波数が割れ当てられ、主局はその
6 倍、赤従局が 8 倍、緑従局は 9 倍、紫従局は
5 倍の周波数で送信します。
|
 受信機ではそれらの周波数を逓倍し、主局の信号との位相比較を行います。 受信機ではそれらの周波数を逓倍し、主局の信号との位相比較を行います。
ある例を挙げるとおおよそ、主局と赤従局では距離差が約
450m ごとに位相が一致し、緑従局とでは約 600m、紫従局の場合では約
360m ごとに一致することになります。これは比較する周波数の半波長になります。
また、主局と一つの従局の間で位相が一致する線とその次の線との間をレーンと呼び、基本周波数に相当する距離差である約
11Km となる線がゾーンとなります。
例えば、主局と赤従局間の基線上では 1 ゾーンの中に
24 本(レーン番号 0〜23)のレーンが存在することになり、緑従局間とでは
18 本(30〜47)、紫従局との間では 30 本(50〜79)となります。
位置の計測には専用の海図を用い、それにはこのレーン番号とゾーン番号(A〜J)が記載されています。そして受信機に表示されるレーン番号及びゾーン番号を参照することで、現在位置を特定することができるようになっています。
|
 また、受信局側では絶対位置の検出はできませんので、今いるレーンがどれなのかを特定した場合に計測が意味をなすことになります。従って機械的なカウンタを用いて、既知の地点からの移動とともに位相が一致する回数を計測、正確なレーン番号とゾーン番号をカウントすると言う方法で問題を解決しています。 また、受信局側では絶対位置の検出はできませんので、今いるレーンがどれなのかを特定した場合に計測が意味をなすことになります。従って機械的なカウンタを用いて、既知の地点からの移動とともに位相が一致する回数を計測、正確なレーン番号とゾーン番号をカウントすると言う方法で問題を解決しています。
ちなみに測位精度は電離層の状態に影響され、10m〜100m
程度と言われています。また、ロランほど広い海域をカバーすることはできません。なお、北海道チェーンに関しては
GPS の普及に伴い、2001 年 2 月末で廃止された模様。
本項末にデッカ受信機(実物)の写真を示します。
|
|
オメガ
 オメガは超長波を利用し数局の送信所で全地球をカバーしようと言う、究極の双曲線航法といわれています。82
年に全ての送信所が完成しシステムが運用が開始されました。また、日本の対馬にもオメガの送信所があり、高さ
450m で当時としては東洋一の電波塔(自立型ではないが、あの東京タワーよりも高い!)でした。 オメガは超長波を利用し数局の送信所で全地球をカバーしようと言う、究極の双曲線航法といわれています。82
年に全ての送信所が完成しシステムが運用が開始されました。また、日本の対馬にもオメガの送信所があり、高さ
450m で当時としては東洋一の電波塔(自立型ではないが、あの東京タワーよりも高い!)でした。
参考までに古い文献から引っ張り出してきたオメガ・対馬局の送信アンテナを掲載しておきます。このアンテナには専用のエレベーターがあり、頂上?までメンテ用にあがれるようになっています。
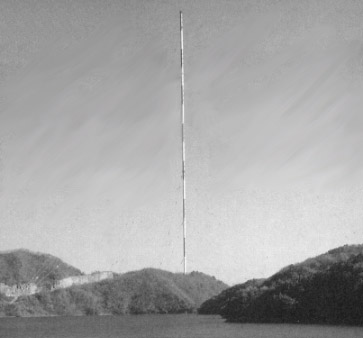 このアンテナ、ステーが 600m もの長さで張られているのですが、設置面積が
1Km 四方というからその規模がわかっていただけるでしょう。 このアンテナ、ステーが 600m もの長さで張られているのですが、設置面積が
1Km 四方というからその規模がわかっていただけるでしょう。
オメガの特徴はなんと言ってもやはり超長波(10〜14KHz)を利用するため、わずか
8 局の送信所で全地球をカバーするという点にあると思います。この波長では地球表面と電離層の
D 層(高度約 60〜90Km)間がまるで、導波管のように働き減衰せずに遠距離を伝搬するという特徴があります。
またオメガの送信所は 1 万 Km 近くの間隔で設置することができ、双曲線の基線長も非常に長くなっていることが分かります。基線長が長いと言うことは、測位精度の変化が少ないということになり、昼間で
926m(0.5 海里=NM)、夜間で 1852m(1 海里=NM)となります(昼夜の差は電離層による影響)。
さらに上記の長距離伝搬の特徴から、地球上のどの場所でも
5〜6 局の信号が受信できるため、それらの中からもっとも精度の良い組み合わせで測位することが可能となっています。
オメガでは先のデッカと同じように各信号間の、位相差を測定しさらにデッカと類似のレーン識別を行い測位しています。ですから、同じように位相差の整数倍の不確定要素が発生しますから、あらかじめ既知の座標を把握しておく必要があります。
詳細は割愛しますが、オメガでは各送信所が
10.2KHz の位相比較用波と、数種類の送信信号を時分割で順番に送信します。その、1
フレームは 10 秒で各局のタイムスロットに相当する、時間がおおよそ
1 秒間隔で割り当てられています。
従って、その送信される順序で送信所の識別を行っています。また全ての局間では
0.2 秒の間をおいて送信されており、これは
TDMA でのガードバンドに相当します。これにより、地球の反対側から伝搬してくる電波による干渉を、防いでいます。(短波や長波の伝搬では、最短距離で伝搬するショートパスと、先の様な最長距離で伝搬するロングパスがある)
またオメガで使用される波長は約 30Km にもなります。それでもデッカなどと比べて精度がよいのは、双曲線の基線長が長いからに他なりません。
なお、このシステムは現在運用終了となっています。
|
■衛星系システム・NNSS(アメリカ)
衛星を使った電波航法システムのトップバッターは、世界で初めて実用化された航法衛星である米国の
NNSS をご紹介します。
NNSS(Navy Navigation System Satellite)は、別名トランシット(Transit)とも言われています。昔はちょっとした
GP アンテナでも 150MHz と 400MHz 前後にチャンネルを合わせれば、「ピーヒョロヒョロ」といった信号音が聞こえたものです。
しかしかなり前からサッパリ聞こえなくなったので、とうとう衛星の寿命がつきたようです(^_^;)。
これは米海軍が 64 年から打ち上げていたもので、全部で
16 個の衛星が打ち上げられました。そのうち、93
年の時点で運用されていたものは、5 個となっています。NNSS
は電波信号のドップラーシフトを利用した電波航法で、現在はすでに廃止されています。
また民間利用が認められたのは 67 年からです。
NNSS の諸元
|
軌道高度など
|
軌道高度・約 1000Km
全て南極・北極を通過する極軌道
周回周期約 1 時間 47 分 |
|
使用周波数帯
|
149.988MHz および 399.968MHz の 2 波 |
|
測位に必要な衛星個数
|
1 個 |
|
衛星の飛行スピード
|
約 7.4Km/s |
当初の予定では GPS が完成する 96 年頃(衛星の寿命がつきるまで)までに廃止される、ということになっていましたが正確な廃止時期は手元の資料では不明です(^_^;)。
NNSS の測位原理は衛星より送信される電波自体の、ドップラーシフトによる周波数変化を継続的に観測することで現在位置を求めるもの。救急車のサイレンが近づくにつれて高く聞こえ、最短距離になったとき実際と等しい周波数になり、そして遠ざかっていくと徐々に周波数が低く聞こえる、というアレと全く同じです。
 衛星の位置(軌道)は既知ですから、数分間にわたり衛星が上空を通過する間、受信周波数のドップラーシフトを測定すればよいことになります。 衛星の位置(軌道)は既知ですから、数分間にわたり衛星が上空を通過する間、受信周波数のドップラーシフトを測定すればよいことになります。
測定開始位置(衛星が近づき始める)を T1、衛星との距離が最短になる少し前を
T2 、最短距離を T3 とし、ドップラー効果による、周波数の変化を求めると
T1 と T2 を焦点とする双曲線が描けます。また、同様に
T2 と T3 を焦点とする双曲線も得られることになります。
そしてこの 2 つの双曲線は 2 点でまじわり、そのどちらかが現在位置となります。
衛星からは正確な時刻データと衛星の、軌道データが送信されています。また、二つの周波数を使うのはやはり
GPS と同様に電離層による遅延誤差をなくすためで、さほど精度を必要としなければ
400MHz 帯の受信のみで、測位することも可能となっています。
それから、送信周波数が半端に低くなっている(約
80ppm)のは、受信側での基準周波数よりも受信周波数が決して高くならないように、という配慮からです。気になる測位精度は理想的な条件下で
10〜30m 程度で、電離層の状態(太陽活動に同期)により最大で
10 倍ほどまで劣化するようです。
NNSS では地球の極から離れるほど、衛星の信号を受信できる時間帯が少なくなってきます。そこで通常は速度と方位から位置を計算する、推測航法装置というものを併用してました(ようは慣性航法といっしょ)。
また、確か渡り鳥の航跡や衛星イーパーブ(船舶用救難ブイ)の測位にも、同じ原理が使用されていたはずです。(使用する衛星は違います)。ただし、この場合は測位する地点が電波を発射し、衛星側がそれを受信する形になるので、送受信の位置関係が逆になりますから注意が必要です。
NNSS は原理こそ単純ですが、初めて衛星による航法システムを実用化したところに意義があると思います。
ただし測位には数分間にわたる測定が必要なこと、測位点が移動するような場合それを何らかの方法で補正してやる必要があることなどから、即時性が求められる用途には向かず主として船舶に用いられていました。
|
GLONASS(ロシア)
GLONASS は旧ソ連(現ロシア)が開発していた、軍事用衛星測位システムです。ほぼ
GPS と同時期 70 年ころから打ち上げが行われてきた、と言われていますのでまさに冷戦まっただな中に両者は開発されていたことになります。
その後の旧ソ連邦崩壊などで現在ではロシア国防省科学情報処理センターが運用しています。
GLONASS が公になる前からイギリスなどでは衛星信号の解読が行われていたようですが、旧ソ連は
88 年に GLONASS の信号の一部仕様を公表しています。
GLONASS の諸元
|
衛星個数
|
24・現在は 定常運用 24+予備 6 の計 30 個で運用 |
|
軌道数・周回周期
|
3本(軌道傾斜角約 65゜)
周期 11 時間 15 分 43.8 秒 |
|
軌道高度
|
約 19100Km |
|
使用周波数
|
L1 1.602GHz+N×562.5kHz
L2 1.246GHz+N×437.5kHz
上記の法則で FDMA
(FDMA=衛星ごとに異なる周波数・N=チャンネル番号)
送信信号は直接スペクトラム拡散(DS-SS)
|
|
測位精度
|
>100m
※チップレートが低いため、GPS よりは劣り、なおかつやはり標準、精密測位が用意されている。
|
|
備考
|
チップレート 0.511Mbps(標準用)
5.110Mbps(精密用) |
GLONASS はソ連版 GPS と言ってもいいほどシステムが酷似しています。それは衛星を使い二つの搬送波を用いてスペクトラム拡散を使用すること、及び軌道配置や目的やさらには測位原理に至るまでそっくりです。
大きな違いは GPS が全ての衛星で同じ周波数を使い、PRN
コード(拡散符号)を変えることで多重化(CDMA)しているのに対し、GLONASS
は FDMA を使い全て同じ拡散符号だという点です。
また GPS の補完を目的として、衛星の相乗りも一時期検討されていたようですが今では全く情報がありません(^_^;)。かつてより
GPS/GLONASS 双方を搭載した受信機も登場か?、とまで言われていたのですが民生品でも近年ようやく姿を現したようです(GARMIN
の新型機種や近年のスマートフォン用チップセットなど)。
それにしても、さすがは社会主義だった旧ソ連が作ったシステムです。調べ物をしようにも
GPS の文献は豊富でも、GLONASS を記述したものはほんのわずかでした。
GLONASS 運用状況の変遷
当方へ寄せられた情報によれば、旧ソ連の民主化(すなわち国家の崩壊)とともにロシアへと開発が引き継がれ、一時期('95年)は
24 衛星によるシステムが完成したこともあったようです。
しかし衛星の設計寿命が短く後継衛星の打上が追いつかなかったため、後
99 年には 9 個、2000 年には 8 個にまで減少。
詳細な経緯は不明ですが 2007 年半ばには
17 個、更に同年 12 月に 3 機追加され 20 個に。やはり最新の衛星では設計寿命の長期化が図られている模様です。
また'10 年 12 月 06 日配信の海外ニュースによれば、3
機まとめて打ち上げられたものの軌道投入に失敗し衛星が失われたと記事あります。同記事ではこの打上が成功していたならば
26 機でシステムがフル稼働する予定だった、とあり当時計算上は
23 機であったことが伺えます(残念ながら裏はとれていません)。
'14 年 03 月末に新たな衛星が打ち上げられた時点での情報では、全
29 機となっておりその内訳は定常運用が 24
機、予備機 3 機、試験中 1 機、今回('14 年
3 月)打ち上げが 1 機となっていました。
その後同年 6 月の追加打ち上げ時には詳細不明ですが、やはり
24 機が定常運用中のところ追加により計 30
機となっており、更に 12 月には後継となる新型衛星の試験機が打ち上げに成功しております。
よみがえった GLONASS
 旧ソ連邦という世界最大の社会主義国家崩壊('91)、といった未曾有の危機により一時期はシステムの完成を危ぶまれた時期もありました。 旧ソ連邦という世界最大の社会主義国家崩壊('91)、といった未曾有の危機により一時期はシステムの完成を危ぶまれた時期もありました。
しかし、一時は最低 8 個にまで落ち込んだ衛星も徐々に数を増やし、数年前より
24 機による定常運用でシステムが完成、不死鳥の如くよみがえったのです(右図は実際に
GLONASS を受信している様子)。
旧ソ連邦崩壊後、新体制に移行してからも数々の打ち上げ失敗など、紆余曲折を経た
GLONASS ですが新しい衛星もおそらく、現在は試験に移行しているものと思われます。
まだまだ実際の利用では受信できる衛星数が少ないことがあり、測位まで時間を要することからシステム単独では微妙な所があります。しかしながら、GPS
など他のシステムとの併用と言った面では、なんとか活用できる状態にまで至っている、と言えるのではないでしょうか。
もしさらに現在までの詳細な運用状況、旧ソ連崩壊やその後のロシア連邦での計画がどう変わったのかなど、その変遷についてご存知の方がいればぜひお知らせくださいm(_
_)m。
|
GALILEO(ガリレオ・ヨーロッパ連合・旧呼称
Navsat)
GALILEO(ガリレオ)はヨーロッパ宇宙機関(ESA)が計画した、航法衛星システムです。現在のところ手元に詳細な資料はありませんが、概要やその後判明した最新・追加情報だけでもお伝えしたいと考えております。
当初は Navsat(ナブサット)という呼称でスタートし、計画の発表は
85 年で 91 年当時の資料によると、衛星の打ち上げ計画すら明確にされていませんでした。
またほぼ同時期に規格が提案された、ドイツの
GRANAS と統合され今現在では GALILEO と呼称され、計画は続行されています。
このシステムの変わったところは、周回衛星及び静止衛星を併用することでしたが大幅な計画変更により、周回軌道衛星のみでの運用になった模様です。
大幅な計画変更を経て実用化に向け推進
参考までに計画当初の軌道について記しておきます。GALILEO
の衛星数は 18 機で GPS では全ての衛星が地球を半日程度でまわる軌道を有していましたた。
これに対し一本の静止軌道に 6 個の衛星を配置。さらに、傾斜角を持つ
3 個の楕円軌道(※)に 2 個ずつ衛星を配置します。
楕円軌道は北半球での測位が優先的となるよう、北半球側の高度の方が高くなっています。
※高緯度地域で常時、天頂付近に衛星が見える状態になる特徴がある。
我が国の準天頂衛星「みちびき」の考え方に似ている。
これが最新の計画では中軌道の周回衛星のみで
3 つの円軌道になり、それぞれ現用・予備機を配置するという他のシステムに近い構成となりました。
また GPS との際だった違いはあくまで、民間ベースの衛星であり通信機能(救難用)も併せ持っている点でしょう。現在では
EU(欧州連合)が費用負担し、一部サービスを有償とすることなどが決まりました。下記にこのシステムの概要を示します。
GALILEO(Navsat) の規格概要
|
使用衛星個数
|
現用 27 機、予備 3 機の計 30 機
|
|
軌道の詳細など
|
軌道高度 23222km
軌道傾斜角 56゜で 3 本の円軌道
※当初計画(参考情報)
静止軌道 高度約 36500Km
楕円軌道 遠地点高度約 39500Km
近地点高度約 1500Km
傾斜角約 63゜
衛星の周回周期約 12 時間・それぞれの軌道に 6 機ずつの衛星を配置 |
|
信号形式
|
全て同じ周波数で送信される
全て同一 PRN コードによる直接拡散方式
ただし、干渉を防ぐために時分割送信される
このほか、ドップラーシフトによる測位も可 |
|
測位精度
|
PRN コードによる疑似距離算出 5〜10m>
ドップラーシフトによる演算 100m>
搬送波の位相を見れば、精密測位も可
※最新計画では電離層遅延補正により 1m 以下の制度を目指している
|
ロシアの GLONASS ほどではないにしろ、様々な紆余曲折(※)を経てかなりの長期的な計画となっていますが、近年になってこのシステムもようやく実用化に向けて動き出したようです。
※計画途中での東西ドイツ統合、EU の発足、費用負担を巡る
様々な軋轢等々… ^ ^;
報道では使用周波数を米国が GPS と同じバンドとすることを、欧州側の干渉回避案を受け入れ容認したとのことで、'09
年秋現在で 2 機が打ち上げられている模様。
衛星 18 機による初期サービスを目指していた
'14 年 08 月、残念なことに 2 機が打ち上げ自体には成功したものの、正常な軌道に投入できなくなると言う事態が発生しています。
これは衛星の打ち上げに使用された、ロシアのロケット自体の不具合により誤った軌道に投入されてしまったものです。
当時、まだまだ行き先の不透明な部分などもありましたが、'16
年には 18 機のままサービス開始となりました。その後も打ち上げが続けられ
'19 年秋時点の情報では、27 機体制を確認できています。
そして '19 年度中には衛星全 30 機となる計画通りのサービスを目指しており、今後の動向がますます注目されます。
GALILEO の基本機能は無償で利用できる計画ですが、耐妨害性をもつサービスなどは有償となるのとのこと。この有償サービスは採算性について懐疑的な見方が多いようです。はたしてどうなることでしょうか。
衛星の修理はできないものか!?
余談ですがたまに一般の方に静止衛星(放送衛星等)をスペースシャトル等(運用終了済み)を使って修理できないか?という、とんちんかんな質問を受けることがあります。
ご存知ない方のために解説しますが、スペースシャトルの取れる高度はたかが地上から
5〜600km 程度が限界です。
それに対し静止衛星は約 36500Km でこれより低くても、高くても地球の自転周期とは一致しません。また、静止軌道はたった一本しかなく貴重な国際資源となっています。どれくらい遠いかというと、地球の直径の約
3 倍もあるのです。これでいかに静止軌道が遠いか分かっていただけると思います。
宇宙を海に例えるならばスペースシャトルの航行できる範囲は、たかだか東京湾程度やその近海にすぎず静止衛星ははるか太平洋沖の大海原にある、ともいえるでしょう。
スペースシャトルはまだまだクルーザー(主に搭載燃料の関係)のようなもので、長期間外洋を航行できる大型船レベルには達していないのです。もちろんアポロ計画のようにお金をかければ、技術的には静止軌道まで飛べる宇宙船を建造できるでしょう。
しかしそのコストは衛星のそれを遙かに上回ってしまいますから本末転倒です。従って残念ながら静止衛星の修理は現実的には困難です。低軌道上での周回衛星修理(高度約
600km にあるハッブル宇宙望遠鏡の修理・延命はあまりにも有名)がせいぜい、というのが実状なのです。
そんなシャトルも 2011 年に引退してしまいました。
|
オムニトラックス(アメリカ・日本)
 とうとう電波航法システムもネタがつきてまいりましたので、GPS
の応用サービスを挙げてみたいと思います(^_^;)。(右の写真はトラックの屋根に取り付けられたアンテナ) とうとう電波航法システムもネタがつきてまいりましたので、GPS
の応用サービスを挙げてみたいと思います(^_^;)。(右の写真はトラックの屋根に取り付けられたアンテナ)
オムニトラックスは日本でも同名のサービスが行われている、通信・航法を融合させた車両の運行管理システムです。
GPS と通信衛星を組み合わせて使用するため、基本的にはアメリカもしくは日本全土をカバーしており、従来のシステムでは不可能だった全国規模の動態管理・双方向データ通信システムを提供します。
アメリカでのこのサービスは当初、ロラン
C (現在では GPS 化されているでしょう)を用いて行われており、通信には静止衛星による
12GHz 帯の自動追尾機能を持ったアンテナを使用します。
長距離トラックの屋根に直径 30cm 弱の鍋をひっくり返したような、白いアンテナがあったとしたら恐らくそれがオムニトラックスです。国内でも大型トラックをよく観察していると、時々このアンテナを見ることが出来ます。このアンテナ、走っているのを見かけることは出来ても文字通り”走行中“のためなかなか撮影ができず、写真を掲載できませんでした(^_^;)。
しかし先日、ようやく止まっているトラックに搭載されたアンテナを発見、すかさず撮影してきました。
日本では、GPS と CS(通信衛星)の組み合わせにより、新日本製鉄と伊藤忠が事業化している模様です(車載機器類は日本電装が担当)。
このシステムでは AVM 様の運行管理システムが提供され、長距離トラックの運行管理が可能となります。通信には衛星を使用するため、アメリカ全土もしくは日本全土がカバーされます。日本でのサービスには民間の通信衛星(JC-SAT)と
GPS を組み合わせて利用しています。
従来の AVM システムでは、利用する無線システムのカバーエリアによる制約から(各種業務無線や
MCA が多い)、タクシーや宅配などのある程度限られた地域を運行するものものしか実用化していませんでした。
オムニトラックスでは、広範囲に使用できる
GPS と衛星系双方向の通信システムとリンクすることにより、アメリカまたは日本全土がカバーできる、他にはないすばらしいシステムとなっています。
従来からある AVM より圧倒的にサービスエリアが広いオムニトラックスではありますが、残念ながらデータ通信のみで音声通話機能はありません。
|
ジオスター(アメリカ・地上系/衛星系混在)
これもやはり、双方向通信機能と測位機能を提供するサービスです。米国のジオスター社が行っており、北米だけでなく世界的にサービスを行う計画もあるようです。
システム構成は、地上の制御局、測位の基準用に用いる地上固定局、さらにユーザー端末、および
2 個以上の静止衛星とされています。このシステムでは
LAN ネットワークの一形式である、ポーリング方式と同じ方法でユーザー端末と通信を行います。
制御局ではすべてのユーザーに対し質問信号を出し、端末は自分の
ID が受信されたときのみ通信を行います。この信号は
2 つの静止衛星で同時に受信されます。このときの到達時間差を測定することにより、測位が行われています。
また、地上固定局に対しても同じ信号のやりとりをし、その到達時間差を測定することでより正確な補正情報が得られることになり、測位精度が向上します。
なお計画では測位に GPS などを用いることになっており、現在は
GPS で運用されている可能性もあります。ここまでで気づかれ方もいるかと思いますが、このサービスもオムニトラックスと同様、主に長距離トラックなどに利用されています。
|
むすび
たいへん長々と書いてしまいましたが、最後までお読みいただきまことにありがとうございますm(_
_)m。読者のみなさんによる情報提供のおかげで、執筆完結後も随時最新情報に更新することが可能となりました。
この場を借りて最新情報の提供等に感謝の意を表すと共に、今後ともご支援の程をよろしくお願いします。
|
記事一覧にもどる
 |